Tarefa 6 - Bouncing Easy (Navegação)
Objetivo: Takeoff, pousar e decolar de todas as bases, não visitar a mesma base 2 vezes, pousar na base inicial.
Como o foco desta tarefa é a navegação, e não a percepção, você não precisará identificar os marcadores por visão computacional. No entanto, deve considerar suas posições como fixas e definir o comportamento ideal a partir dessas informações.
Use a configuração 3 de mundo eletroquad:
. launch_eletroquad_as2.bash -3
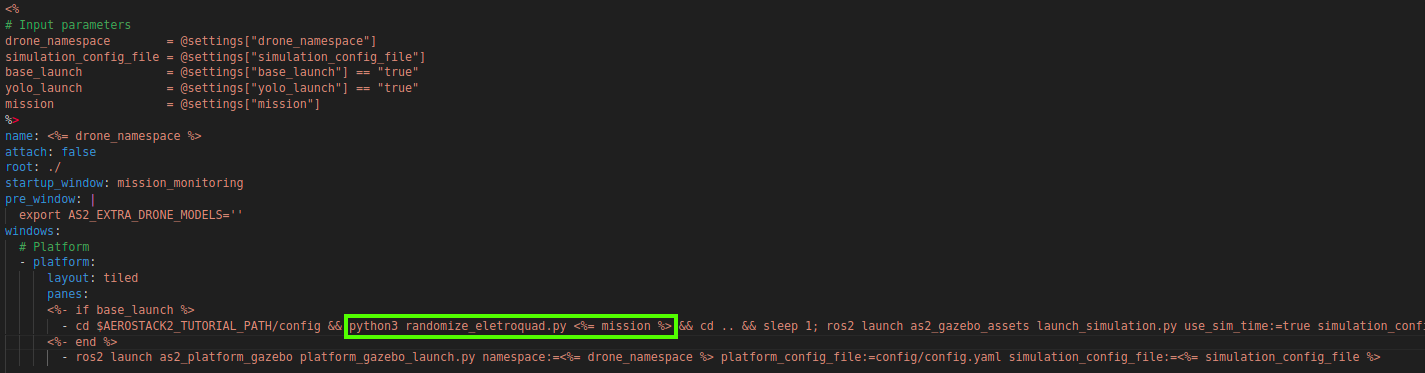
Além disso, delete momentaneamente a linha que randomiza as posições dos objetos no mundo em /tmuxinator/aerostack2_eletroquad.yaml:
Nota
Utilize os exemplos presentes em /examples como inspiração para seu trabalho. Nomeie o arquivo como mission_bouncing_easy.py
Mundo: «grass» com as adições de modelos gerados por randomize_eletroquad.py.
Comportamento esperado: