Execução Inicial
Conteúdo básico: Aqui você aprenderá como executar a simulação completa e customizá-la.
—
Execução da Simulação
Assim que estiver dentro do Docker, vá até a pasta do aerostack2_tutorial:
cd_tutorials # (cd /root/tutorials/src/aerostack2_tutorial)
Para executar a simulação, utilize o seguinte comando:
. launch_eletroquad.bash -t px4 -2
Existem vários parâmetros para executar a simulação, você pode ver todos eles em Aerostack2-Docs. Foram adicionados outros parâmetros de execução para este ambiente.
Parâmetro: «type», que pode conter «px4» ou «mavros». Parâmetro: «mission», que pode conter «1», «2» e «3».
Alterando o tipo de simulação, você estará modificando a plataforma aérea de comunicação com o controlador. PX4 usa o xRCE-DDS e Mavros utiliza Mavlink. Lembre-se que como estamos utilizando um framework de alto nível, o código de execução em Python é o mesmo.
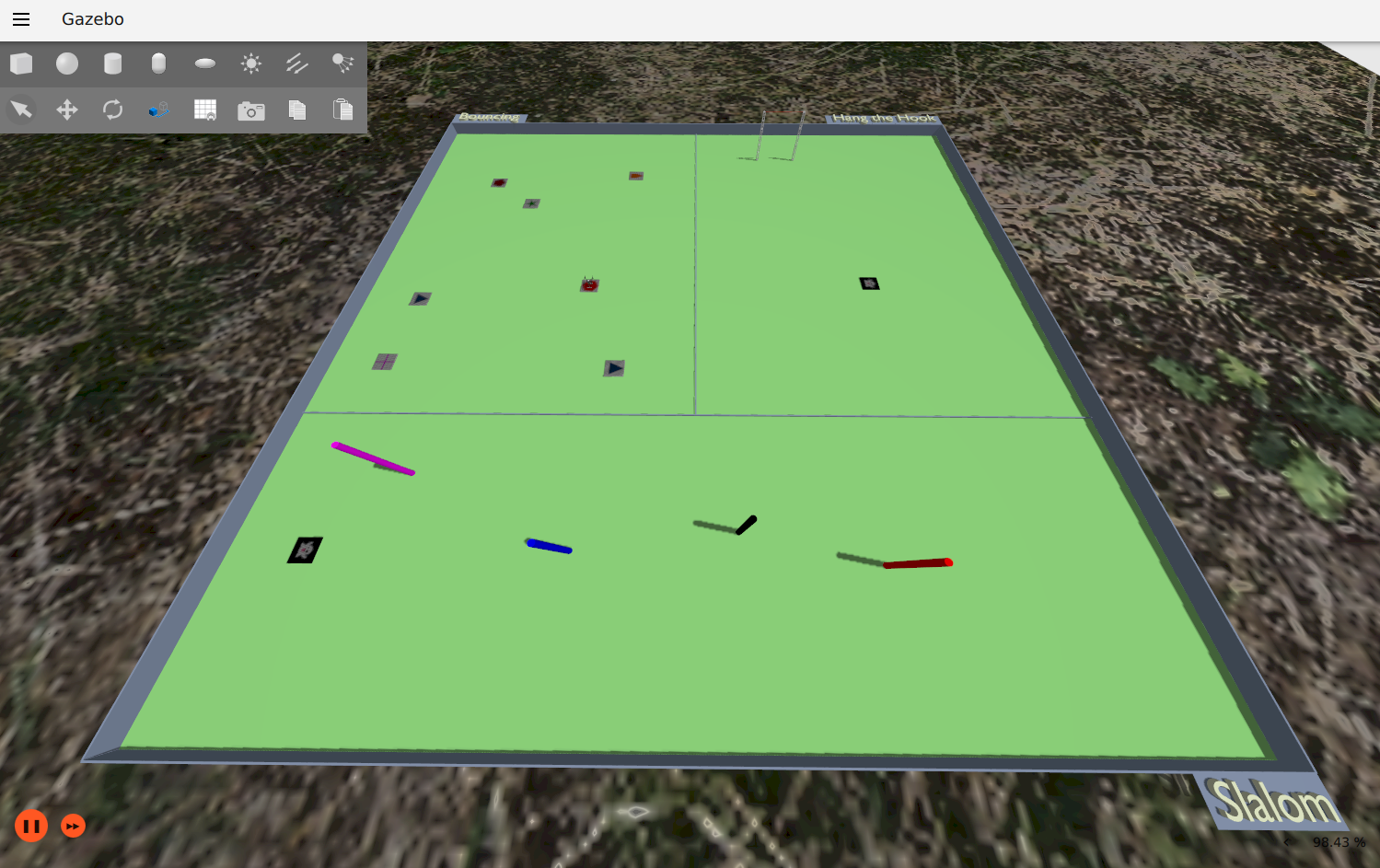
Alterando a missão, mudaremos a localização inicial do drone na simulação e geraremos parâmetros específicos para cada missão da Eletroquad 2025. «1» = Slalom, «2» = HangTheHook, «3» = Bouncing.
No mundo do Eletroquad, todos os modelos presentes são réplicas exatas dos itens que serão utilizados na competição presencial, com dimensões e cores compatíveis.
Nota
Para ajustar qualquer parâmetro da sua simulação, edite o arquivo .yaml correspondente, que estará localizado no diretório: /root/tutorials/src/aerostack2_tutorial/tmuxinator.
Neste arquivo, você pode:
Adicionar ou remover abas no TMUX.
Modificar condições de execução.
Ajustar parâmetros da simulação.
Execução Padrão
Vamos começar com a simulação padrão, no mundo Eletroquad, usando uXRCE-DDS e missão 2, HangTheHook.
. launch_as2.bash
Deverá aparecer a simulação da Arena Eletroquad com um drone modelo X500 e o terminal personalizado pelo Tmuxinator.
Nota
O Tmuxinator é uma ferramenta que facilita a gestão de sessões do terminal tmux, permitindo a criação e o gerenciamento de configurações de sessões, janelas e painéis de forma simples e automatizada. Com ele, é possível definir o layout de trabalho e os comandos a serem executados em cada janela e painel, oferecendo uma maneira prática de configurar ambientes de desenvolvimento ou tarefas repetitivas no terminal. O Tmuxinator usa arquivos de configuração no formato YAML, que permitem personalizar e replicar ambientes de maneira eficiente, tornando-o uma excelente escolha para quem trabalha com múltiplas janelas ou processos no terminal.
Com o Tmuxinator também é possível criar atalhos para navegação entre os terminais e abas do Tmux. As configurações utilizadas no aerostack2_tutorial estão localizadas em /root/tutorials/src/aerostack2_tutorial/to_copy/tmux e foram copiadas para $HOME/.tmux.conf no momento do build do container para que as alterações surtissem efeito. Se quiser, altere esse arquivo para customizar seu terminal e atalhos.
Atalhos criados:
Você deve soltar o (Ctrl + b) antes de apertar qualquer outra tecla para o comando funcionar
(Ctrl + b) + k : Fecha todos os programas no TMUX
(Ctrl + b) + [ : Sobe ou desce as linhas em alguma janela
(Ctrl + b) + ↑ ↓ → ← : Muda as janelas
(Ctrl + b) + 1 2 3 4 : Muda as abas
(Ctrl + b) + k : Fechar todas as abas do TMUX
Vá então para a aba user e na janela superior execute uma missão demo:
cd examples && python3 mission_default.py
Se tudo der certo você terá feito o primeiro voo simulado com o framework Aerostack2.